

 联系我们
联系我们

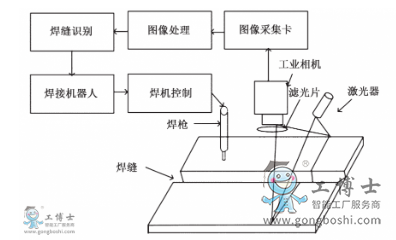
整个焊缝自动跟踪控制系统主要包括控制系统部分、执行器部分和传感系统部分。其中,传感器系统是实现自动跟踪的关键;传感器系统的主要功能是实时检测焊缝位置,并将位置信息发送给控制系统;控制系统根据传感器发出的信息实时调整焊枪的位置,保证焊枪的实时性。跟踪焊缝,实现后续焊接机器人对焊缝的自动跟踪。
CCD相机是一种半导体器件,其功能是将光学图像信息转换为数字信息。在焊接机器人的焊接过程中,CCD充当了焊接机器人的“眼睛”。它的功能类似于人眼。主要采集焊缝的图像信息,是主动视觉模块的核心部件。 CCD摄像头捕捉到的图像的清晰度直接决定了后续图像处理的效率和效果。
OTC机器人在焊接时会产生大量高亮度弧光,采集到的焊缝图像会受到弧光的干扰,导致焊接不完整,因此需要额外增加一个光源帮助CCD相机更好地捕捉焊缝图像。.激光传感器以其激光发射稳定、精度高、图像清晰等优点得到了许多研究人员的认可。本文选用激光传感器作为传感部分;视觉模块选用CCD摄像头和激光传感器,可有效提高焊接质量。
滤光片一般是通过在玻璃片上添加一些特定的颜色来形成的。它的作用主要是使CCD镜头滤掉一些不需要的波长的光,只通过需要的波长的光,从而有效去除一些噪声干扰带。 ,主要滤除弧光和自然光。另外,由于需要与激光传感器本身的波段相匹配,所以需要选择与激光传感器的波段相匹配的窄带滤光片,这样可以减少大部分的弧光干扰,从而提高焊接图像的质量和准确性。
焊接作为一种工艺,广泛应用于工业生产;同时,它也是工业生产中非常重要的一个环节。传统的焊接工作主要由人工完成。由于焊接工人技术水平的限制,存在焊接质量不稳定、焊接精度低等问题。与手工焊接相比,机器人焊接更安全可靠。另外,机器人本身不受工作时间的限制,因此效率更高,因此工厂焊接的自动化、智能化是焊接工艺发展的必然趋势。
